曲率的定义
1、曲率的定义
曲率(Curvature)是描述曲线弯曲程度的量度。在二维空间中,对于一条曲线,曲率在某一点上可以通过以下公式计算:
$$
\kappa = \frac{d\theta}{ds}
$$
其中:
dθ是曲线的切线方向(即车辆朝向)相对于路径切线的变化量。ds是路径上的微小弧长增量。
2、曲率的大小和方向
- 大小: 曲率的大小表示曲线弯曲的程度,曲线弯曲的越大,其曲率越大。
- 方向: 曲率的正负决定了路径的弯曲方向。遵循右手定则,正曲率表示曲线逆时针弯曲,负曲率表示顺时针弯曲。
3、曲率的应用
3.1 曲率的计算
在自动驾驶中,车辆的转弯半径受到前轮转角的限制,从而影响轨迹的曲率。现在有一条正曲率的轨迹,我们分情况讨论一下曲率:
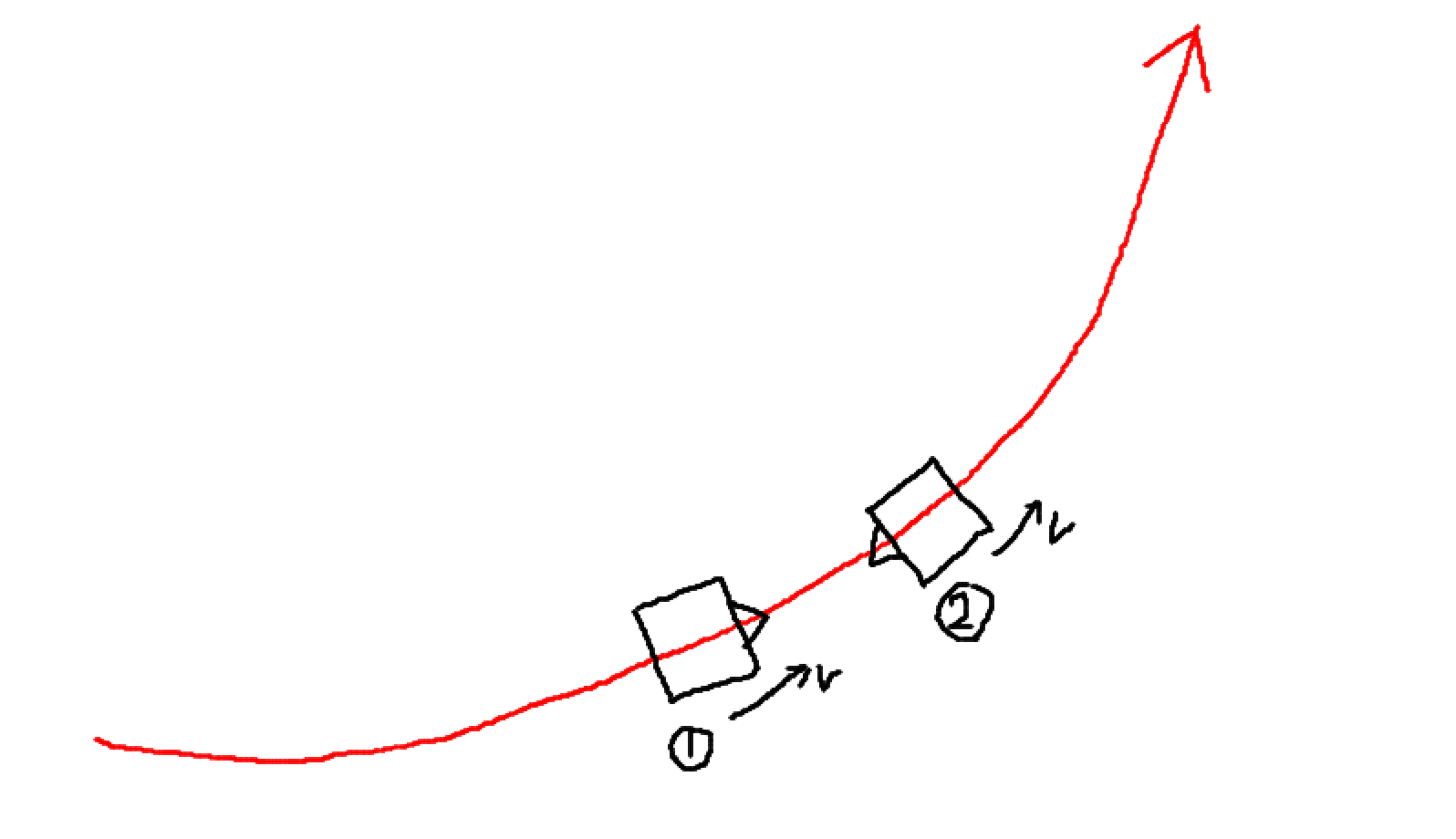
case 1. 一号车的方向是顺着轨迹的,想要跟踪这条轨迹只需要保持速度为正$v>0$并向左打方向盘,$\delta>0, tan(\delta)>0$。轨迹曲率如下:
$$
\kappa = \frac{1}{R} = \frac{tan\delta}{L}
$$
case 2. 二号车的方向是相反轨迹的,想要跟踪这条轨迹则需要倒车,$v<0$ 并向右打方向盘,$\delta<0,tan(\delta)<0$。轨迹曲率如下:
$$
\kappa = -\frac{tan\delta}{L}
$$
总结:
综上,轨迹的曲率与车辆的运动关系可以表示为如下形式,$sign$ 是符号函数。
$$
\kappa = sign(v)\cdot \frac{tan\delta}{L}
$$
上述公式同样适用于其他非完整模型车辆
相关推荐

评论